أعلنت شركة وابي (Waabi) للقيادة الذاتية مؤخراً أنها تعتمد على نموذج ذكاء اصطناعي توليدي لمساعدتها على توقع حركات السيارات.
(Copilot4D) كوبايلوت 4 دي
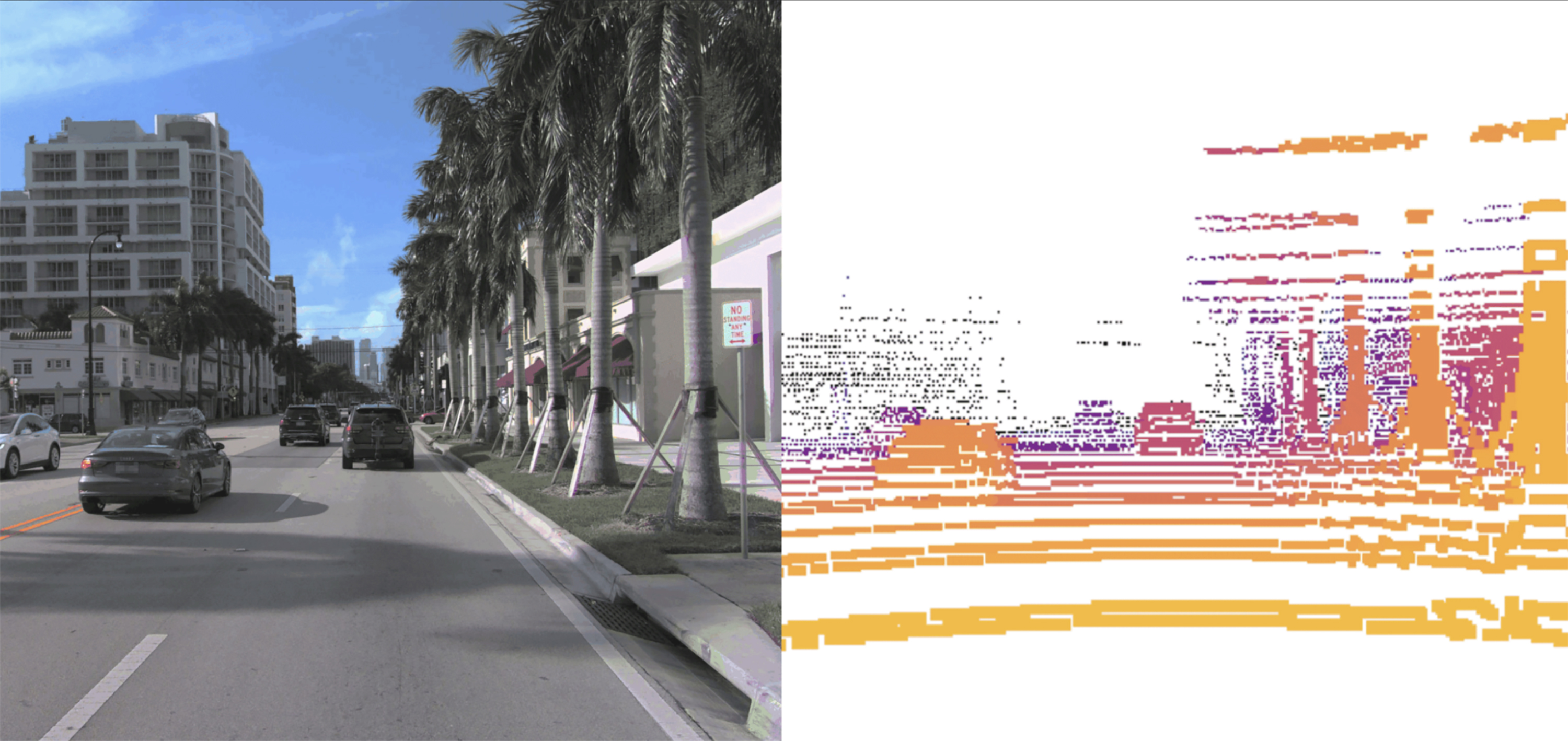
يحمل النظام الجديد اسم “كوبايلوت 4 دي” (Copilot4D)، وقد دُرِّب على كميات كبيرة من البيانات الصادرة عن مستشعرات الليدار، التي تعتمد على الضوء لاستشعار المسافات التي تفصلها عن الأجسام المختلفة. فإذا طلبت من النموذج معالجة موقف طارئ؛ مثل سائق متهور يدخل أحد مسارات الطريق السريعة بسرعة عالية، فسوف يتنبأ بكيفية حركة السيارات المحيطة، ويولد تمثيلاً بالليدار يوضح هذا التنبؤ خلال فترة تمتد بين 5-10 ثوانٍ في المستقبل (ويبين ربما وقوع حادث تصادم بين عدد كبير من السيارات). يتحدث إعلان الشركة عن الإصدار الأولي من كوبايلوت 4 دي؛ غير أن الرئيسة التنفيذية لشركة وابي، راكيل أورتاسون، تقول إن الشركة زودت أسطولها التجريبي من الشاحنات الذاتية التحكم في تكساس بنسخة أكثر تطوراً وأيسر من حيث الفهم، وذلك لمساعدة برنامج القيادة على اتخاذ القرارات المتعلقة بالتعامل مع المستجدات على الطريق.
لطالما اعتمدت أنظمة القيادة الذاتية التحكم، لفترة طويلة، على التعلم الآلي من أجل تخطيط المسارات وكشف الأجسام؛ غير أن بعض الشركات والباحثين يراهن على قدرة الذكاء الاصطناعي التوليدي –أي النماذج التي تولد التنبؤات اعتماداً على بيانات البيئة المحيطة- في المساعدة على الارتقاء بالتحكم الذاتي إلى المرحلة التالية. وقد أطلقت شركة ويف (Wayve)؛ وهي من منافسي وابي، نموذجاً مشابهاً العام الماضي، ودربته على مقاطع الفيديو التي تجمعها سياراتها.
اقرأ أيضاً: لا تغضب كالبشر ولا ترى في المطر: هذه مزايا السيارات ذاتية القيادة وعيوبها
طريقة عمل نموذج وابي
يعمل نموذج وابي بطريقة مشابهة لعمل نماذج توليد الصور أو الفيديو، مثل دال-إي (DALL-E) أو سورا (Sora) من شركة أوبن أيه آي (OpenAI). حيث يأخذ سحباً نقطية من بيانات الليدار، تمثل خريطة ثلاثية الأبعاد للبيئة المحيطة بالسيارة، ويفككها إلى مجموعات، على نحو مماثل لعمل نماذج توليد الصور التي تجزئ الصور إلى بيكسلات. يتنبأ كوبايلوت 4 دي بحركة نقاط بيانات الليدار جميعاً بناء على بياناته التدريبية. وعند تنفيذ هذه العملية بصورة متواصلة، يستطيع توليد تنبؤات مستقبلية تمتد من 5 إلى 10 ثوانٍ.
تُعَد وابي واحدة من مجموعة صغيرة من شركات القيادة الذاتية التحكم؛ بما فيها الشركتان المنافستان ويف وغوست (Ghost)، اللتان تصفان نهجهما بأنه يعتمد على “الذكاء الاصطناعي أولاً“. هذا يعني بالنسبة إلى أورتاسون تصميم نظام يتعلم من البيانات، بدلاً من تصميم نظام يجب أن يتعلم كيفية التعامل مع مواقف محددة. تراهن هذه المجموعة على أن أساليبها قد تتطلب عدداً أقل من ساعات الاختبار العملي على الطرقات للسيارات الذاتية القيادة، وهو موضوع أصبح شائكاً بعد حادث وقع في شهر أكتوبر/تشرين الأول من العام 2023، عندما جرّت سيارة أجرة روبوتية من شركة كروز (Cruise) أحد الركاب على الطريق في مدينة سان فرانسيسكو.
تختلف وابي عن منافسيها في أن نموذجها التوليدي يعتمد على الليدار، لا الكاميرا.
اقرأ أيضاً: أول سيارة كهربائية تعمل بالطاقة الشمسية تدخل مرحلة الإنتاج
الاعتماد على تقنية الليدار
تقول أورتاسون: “إذا أردت أن تصل إلى المستوى الرابع، فتقنية الليدار ضرورية بالتأكيد”، في إشارة إلى مستوى الأتمتة حيث لا تتطلب السيارة انتباه الإنسان للقيادة بأمان. تبلي الكاميرات بلاء حسناً عندما تُظهر ما تراه السيارة، لكنها لا تتمتع بالمستوى نفسه من القدرة على قياس المسافات أو استيعاب الخصائص الهندسية لعناصر البيئة المحيطة بالسيارة، كما تقول أورتاسون.
وعلى الرغم من أن نموذج وابي يستطيع توليد مقاطع فيديو تظهر ما تراه السيارة عبر مستشعرات الليدار الخاصة بها، فإن هذه المقاطع لن تُستَخدم في التدريب ضمن برنامج محاكاة القيادة للشركة، الذي تستخدمه في بناء نموذجها للقيادة واختباره. وقد اتخذت الشركة هذا الإجراء لضمان عدم انتقال أي مقاطع فيديو غير واقعية من كوبايلوت 4 دي إلى نظام المحاكاة واستخدامها في التعليم.
يقول طالب الدكتوراة في جامعة ستانفورد، برنارد آدام لانج، الذي بنى نماذج مشابهة وأجرى أبحاثاً عليها، إن التكنولوجيا التي تعتمد عليها هذه النماذج ليست جديدة؛ غير أنها المرة الأولى التي يرى فيها استخدام نموذج ليدار توليدي يتخطى حدود المختبرات البحثية ويجري توسيع نطاقه للاستخدامات التجارية. ويقول إن نموذجاً كهذا يساعد على جعل “دماغ” أي سيارة ذاتية التحكم عموماً قادراً على التفكير بطريقة أسرع وأدق.
ويضيف قائلاً: “يمثل نطاق التطبيق العامل الفعلي في إحداث تحول جذري. وآمل بأن يصبح من الممكن استخدام هذه النماذج في المهام النهائية التي تعتمد على مخرجات أنظمة أخرى”، مثل كشف الأجسام والتنبؤ بالتحركات اللاحقة للأشخاص أو الأشياء.
يستطيع كوبايلوت 4 دي التنبؤ بفترة مستقبلية محدودة، ويتراجع أداء نماذج التنبؤ بالحركة عموماً عندما يُطلب منها التنبؤ بالمستقبل على امتداد فترة أطول. تقول أورتوسان إن النموذج يحتاج إلى تخيّل ما سيحدث بعد 5-10 ثوانٍ من أجل اتخاذ معظم قرارات القيادة المهمة، على الرغم من أن اختبارات الأداء التي أعلنت عنها وابي مبنية كلها على تنبؤات لما سيحدث بعد 3 ثوانٍ فقط. يقول المدير المشارك في مركز جامعة ستانفورد لأبحاث السيارات، كريس غيرد، إن هذا المعيار سيكون أساسياً في تحديد مدى فائدة النموذج في اتخاذ القرارات.
ويقول: “إذا كانت التنبؤات على مدى 5 ثوانٍ جيدة؛ بينما التنبؤات على مدى 10 ثوانٍ بالكاد تصلح للاستخدام، فثمة عدد من المواقف التي لا يكفي فيها هذا المستوى من التنبؤ على الطرق”.
اقرأ أيضاً: 8 استخدامات غير متوقعة لتقنية ليدار
يعيد النموذج الجديد طرح التساؤل الذي ينتشر عبر أوساط الذكاء الاصطناعي التوليدي: هل نجعل هذه النماذج مفتوحة المصدر أم لا؟ إذا نُشِر كوبايلوت 4 دي، فسوف تسنح الفرصة للباحثين الأكاديميين الذي يعانون مشكلات عديدة في الوصول إلى مجموعات البيانات الضخمة للنظر في آليات عمله، وإجراء تقييم مستقل لمستوى السلامة فيه، بل وربما حتى إحراز بعض التقدم في هذا المجال. وينطبق هذا على منافسي وابي أيضاً. نشرت وابي ورقة بحثية تتضمن تفاصيل عملية بناء النموذج؛ لكنها لم تنشر الرموز البرمجية، وأورتاسون غير واثقة بأن الشركة ستنشرها يوماً.
وتقول: “نريد من الأكاديميين أن يقولوا كلمتهم فيما يتعلق بمستقبل القيادة الذاتية”، وتضيف إن النماذج المفتوحة المصدر تحظى بثقة أكبر. “لكن علينا أيضاً أن نبدي شيئاً من الحرص في أثناء تطوير تكنولوجياتنا، بحيث لا نكشف كل شيء لمنافسينا”.