طور فريق من الباحثين، من مؤسسات مختلفة، خوارزميات ذكاء اصطناعي يمكنها تزويد الروبوتات ذات الأرجل بقدرات محسّنة على التكيف والتنقل في التضاريس غير المألوفة في الوقت الفعلي، الأمر الذي يعتبره الباحثون إنجازاً هاماً سيعزز قدرات الروبوتات بشكل كبير في المستقبل.
تحدي المشي
يمكن للبشر المشي بسهولة نسبية على مختلف أنواع التضاريس؛ فوق الصخور أو الوحل أو السيراميك أو السجاد السميك، يمكنهم المشي على التلال صعوداً وهبوطاً، ويمكنهم المشي بعضلات متعبة أو كاحلين ملتويين، وأثناء حمل أشياء من جميع الأشكال والأحجام والأوزان. السبب في ذلك هو أننا نجري تعديلات مستمرة شبه فورية على طريقة المشي بحسب الظروف المتغيرة في أجسادنا وتحت أقدامنا.
لكن الروبوتات لا تقدر على ذلك. فبالرغم من التطورات الكبيرة التي تم إدخالها على الروبوتات لأداء مهام مختلفة ومعقدة، إلا أنها لا تزال حتى اليوم تواجه مشكلة في المشي في بيئات متغيرة. وتحتاج الروبوتات ذات الأرجل إما إلى برمجتها يدوياً بالكامل لتناسب البيئات التي ستتواجد فيها أو تعليمها التنقل في بيئاتها من خلال مزيج من تقنيات البرمجة اليدوية والتعلم. وتنطوي تلك الطرق على إجراء ملايين التجارب -والأخطاء- ومع ذلك، فإنها تظل غير كافية لتعليم الروبوت ما سيواجهه في الحياة الواقعية.
طفرة في الذكاء الاصطناعي
للتغلب على هذا التحدي، أعلن فريق من الباحثين في كل من جامعة كاليفورنيا بيركلي (UC Berkeley) وشركة فيسبوك وجامعة كارنيجي ميلون، عن تقنية جديدة أُطلق عليها اسم “التكيف السريع أثناء الحركة” (Rapid Motor Adaptation) أو اختصاراً (RMA). ومن المقرر أن يقدم الفريق البحثي النظام الجديد في مؤتمر (Robotics: Science and Systems) الذي انطلق يوم أمس وسيستمر حتى يوم الجمعة القادم.
وفي تقرير منشور على مدونة الذكاء الاصطناعي التابعة لشركة فيسبوك، أوضح الباحثون أن التقنية الجديدة تمثل “طفرة في الذكاء الاصطناعي تُمكّن الروبوتات ذات الأرجل من التكيف بذكاء في الوقت الفعلي مع التضاريس والظروف الجديدة التي تشكل تحديات غير مألوفة”. وأوضحوا أن (RMA) هو أول نظام قائم بالكامل على التعلم لتمكين الروبوت ذي الأرجل من التكيف مع بيئته من الصفر، من خلال استكشاف العالم والتفاعل معه.
وبحسب جامعة بيركلي، يتكون نظام (RMA) من شقين؛ أولاً: وحدة أساسية (وهي الخوارزمية التي يحدد الروبوت من خلالها كيفية التحرك)، وثانياً: وحدة تكيف. تستخدم الوحدة الأساسية تقنية التعلم المعزز (RL) لوضع ضوابط لمجموعات من المتغيرات الخارجية في البيئة. يتعلم الروبوت من خلال عمليات المحاكاة، إلا أن هذا الأمر وحده لا يكفي لإعداده للتعامل مع العالم الحقيقي؛ لأن أجهزة الاستشعار التي يستخدمها لا يمكنها قياس جميع المتغيرات المحتملة في البيئة. وهنا يأتي دور وحدة التكيف التي تمكن الروبوت من تعليم نفسه فهم البيئة المحيطة باستخدام معلومات تستند إلى حركات جسمه. على سبيل المثال، إذا أحس الروبوت أن أرجله تنزلق إلى مسافة أبعد، فسيستنتج أن السطح الذي يمشي عليه ناعم وسيُكيف حركاته التالية وفقاً لذلك.
مواجهة العالم الحقيقي
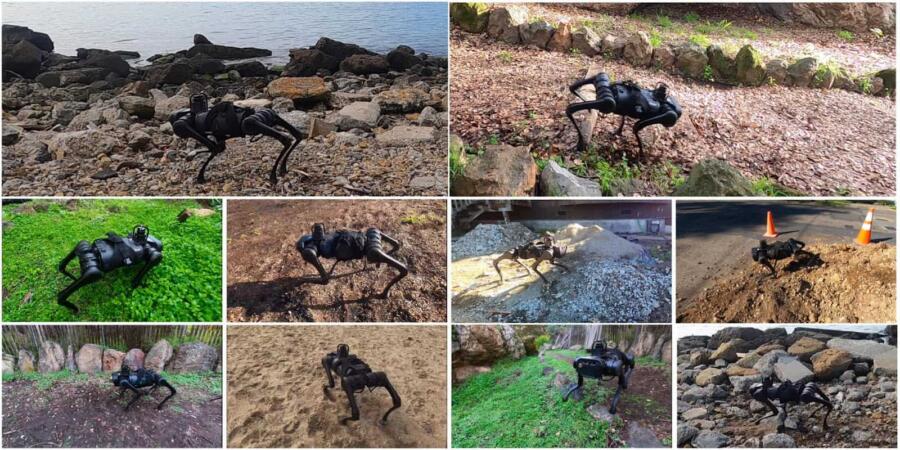
في التجارب العملية، نجح روبوت الاختبار في اجتياز مساحات مفتوحة من الرمال والطين والعشب الطويل وأكوام التراب والمنحدرات الزيتية الزلقة دون أن يسقط. وكما يمكن أن نرى في مقطع الفيديو المرفق هنا، فقد تمكن أيضاً من التكيف والاستمرار في المشي بعدما أُلقيت عليه حقيبة ظهر ثقيلة. كذلك، نجح الروبوت في السير على طول مسار المشي لمسافات طويلة في 70٪ من التجارب، ونجح في التنقل فوق أكوام من الإسمنت والحصى في 80٪ من التجارب، الأمر الذي اعتبره الباحثون إنجازاً مثيراً للإعجاب مقارنة بالنتائج التي حققتها الروبوتات سابقاً في البيئات غير المستقرة.
لا يحتاج تشغيل التقنية الجديدة سوى إلى حاسوب صغير مدمج في الروبوت؛ لأن الوحدة الأساسية ووحدة التكيف يعملان بشكل غير متزامن وبترددات مختلفة. والميزة الأخرى الهامة التي يتمتع بها الروبوت أنه لا يتكيف مع الظروف الجديدة فحسب، بل يفعل ذلك في أجزاء من الثانية بدلاً من دقائق، وهو أمر سيكون بالغ الأهمية عند استخدامه في العالم الحقيقي.
وأخيراً يرى الباحثون أن (RMA) يُمثل تقدماً مثيراً يمكن أن يتيح نشر روبوتات فعالة للغاية وقابلة للتكيف في العالم الحقيقي، لاستخدامها في المناطق والمهمات التي تُعد خطيرة بالنسبة للبشر، مثل المساعدة في عمليات البحث والإنقاذ. كما يوضح أيضاً كيف يمكن للتقدم في مجال الذكاء الاصطناعي أن يعزز قدرات الروبوتات ويقلل بشكل كبير من تكلفتها في المستقبل.