يعتبر التعرّف على الخصائص الفيزيائية للأجسام أمراً في غاية الأهمية من أجل تطوير قدرة الروبوتات على التفاعل مع البيئة المحيطة وإمساك الأغراض والتلاعب بها، ونحن البشر نعتمد على إدراكنا البصري لشكل الأشياء من أجل التعرف على هذه الخصائص.
وهذا ما عمل على محاكاته الباحثان ماثيو بوري وكريستين دانا من جامعة روتجرز في دراسة جديدة لتطوير نموذج رياضي قادر على تعلُّم العلاقة المعقدة بين الشكل المرئي للأجسام والخصائص الفيزيائية اللمسية لسطوحها، مثل الخشونة والنعومة والاحتكاك والصلابة والليونة وغيرها.
تفاصيل النموذج
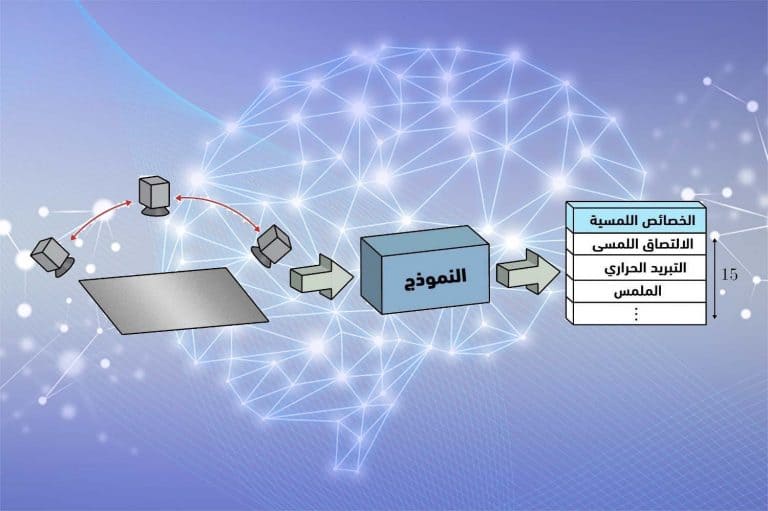
وفق ما جاء في الورقة البحثية التي لم تتم مراجعتها من قِبل الأقران بعد، قام الباحثان بتطوير مجموعة بيانات مرئية – لمسية تضم أكثر من 400 صورة لأسطح أجسام تم تصويرها من 100 زاوية مختلفة، ثم تم ربط كلٍّ منها بأكثر من 15 خاصية لمسية تم قياسها باستخدام حساس لمسي طورته شركة سينتوتش (SynTouch).
واعتمد الباحثان على الدراسات السابقة المتعلقة بالتعرّف على المواد والأجسام في توجيه نموذجهم لاختيار زاوية الرؤية المناسبة لالتقاط الخواص اللمسية للأسطح. بعد ذلك قاما بتصميم شبكة عصبونية ملتفّة (CNN) تستطيع تعلّم الخصائص الفيزيائية اللمسية للأسطح انطلاقاً من صورة واحدة. ثم طوَّرا النموذج حتى يتمكن من اختيار زاوية الرؤية الأمثل للتعرّف على الخصائص الفيزيائية اللمسية لجسمٍ ما.
التطبيقات الممكنة للبحث الجديد
يرى الباحثان أن التخمين الدقيق للخصائص اللمسية للأسطح قد يكون ذا فائدة كبيرة في الأنظمة المؤتمتة. وعلى سبيل المثال، يمكن للنموذج الجديد أن يوفر القدرة للروبوتات على تقدير خصائص السطوح المختلفة، وبالتالي تحسين موثوقية عمله في إمساك الأجسام ونقلها في المستودعات. وفي مجال السيارات ذاتية القيادة، قد يسمح النموذج بتحكم أفضل في مكابح السيارة من خلال تزويدها بالمعاملات الدقيقة لدرجة الاحتكاك على طريق جليدي مما يخفف من انزلاق السيارة. كما يمكن للنموذج أن يساهم في تحسين جودة الإنتاج في المعامل؛ ففي صناعة الألبسة، قد يساعد على التعامل بدقة مع الأنواع المختلفة من الأقمشة مثل الحرير الذي يتطلب عناية خاصة عند معالجته وبشكل يختلف عن الأنسجة الأخرى.
ويأمل الباحثان أن يشكل عملهما خطوة نحو منح الروبوتات الإحساس الاصطناعي باللمس الذي يتمتع به البشر.
المرجع: https://arxiv.org/abs/2004.14487
تعليم الكاميرات الإحساس باللمس: تخمين الخصائص الفيزيائية اللمسية للسطوح انطلاقاً من الصور