
يمكن لجميع مالكي الكلاب أن يشهدوا على الذكاء الخارق لأصدقائهم من الحيوانات ذوات القوائم الأربع. وفي الواقع، يقدم الكثير من الكلاب خدمات جليلة مثل توجيه الأشخاص الذين يعانون من ضعف البصر، أو العثور على الأفراد المفقودين، أو استنشاق المخدرات وغيرها من المواد المهربة.
وتتجاوز هذه القدرات حتى أقوى أنظمة الذكاء الاصطناعي. ومع ذلك، فإن الباحثين في مجال الذكاء الاصناعي لم يستغلوها بعد في تدريب أنظمة الذكاء الاصطناعي لزيادة قدرتها.واليوم تغير الأمر بفضل عمل كيانا إحساني في جامعة واشنطن في سياتل وزملائها الذين جمعوا مجموعة بيانات فريدة من سلوك الكلاب، واستخدموها لتدريب نظام ذكاء اصطناعي لاتخاذ قرارات شبيهة بقرارات الكلاب. يفتح نهجهم هذا حقبة جديدة من أبحاث الذكاء الاصطناعى التي تدرس قدرات الكائنات الذكية الأخرى التي تعيش على كوكبنا.
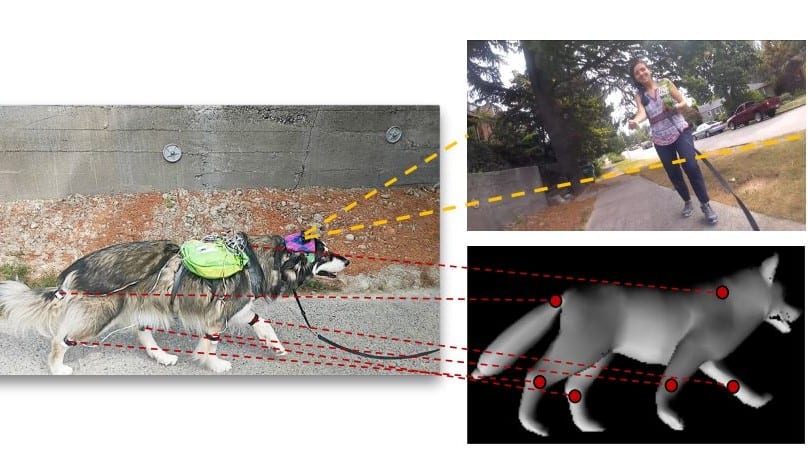
يبدأ الفريق ببناء قاعدة بيانات لسلوك الكلاب. وهم يفعلون ذلك عن طريق تجهيز أحد الكلاب بوحدات قياس القصور الذاتي على ساقيه، وذيله، وجسمه لتسجيل الزوايا النسبية لهذه المناطق والموضع المطلق للحيوان.
كما قاموا بتثبيت كاميرا من نوع "جو برو" إلى رأس الكلب لتسجيل المشهد المرئي، وأخذوا عينات منها بمعدل خمسة إطارات في الثانية، وثبتوا لاقطاً على ظهر الكلب لتسجيل الصوت. وتم تسجيل البيانات عن طريق وحدة تسجيل من نوع "أردوينو" ثُبتت على ظهر الكلب.
في المحصلة، جمع الفريق نحو 24500 إطار فيديو مع بيانات متزامنة عن وضع وحركة الجسم. واستخدموا 21000 من هذه الإطارات لتدريب الذكاء الاصطناعي، والباقي للتحقق من صحة واختبار نظام الذكاء الاصطناعي.
وقام الفريق بالتقصي عن كيفية التصرف والتخطيط والتعلم مثل الكلب.
في المهمة الأولى (التصرف)، كان الهدف هو التنبؤ بحركات الكلب في المستقبل في ضوء تسلسل الصور. ويقوم نظام الذكاء الاصطناعي بذلك من خلال النظر إلى إطارات الفيديو ودراسة ما فعله الكلب بعد ذلك.
ومن خلال التعلم بهذه الطريقة، يصبح النظام جيداً في توقع الحركات الخمس التالية بدقة بعد رؤية تسلسل من خمس صور. تقول كيانا وزملاؤها: "يتنبأ نموذجنا بشكل صحيح بحركات الكلاب المستقبلية فقط من خلال مراقبة الصور التي لاحظها الكلب في الخطوات السابقة".
مهمة التخطيط أكثر صعوبة قليلاً. والهدف هنا هو إيجاد تسلسل من الحركات التي تحرّك الكلب بين مواقع مجموعة معينة من الصور. ويتعلم الذكاء الاصطناعي مرة أخرى من خلال دراسة الحركات المرتبطة بمجموعة واسعة من إطارات الفيديو المتسلسلة.
مرة أخرى ، ينجز النظام هذه المهمة بشكل جيد. يقول الفريق: "تظهر نتائجنا أن نموذجنا يتفوق على هذه الخطوط الأساسية في المهمة الصعبة المتمثلة في التخطيط مثل الكلب من حيث الدقة والتعقيد".
المهمة الأخيرة هي التعلم من سلوك الكلب. ومن الأشياء التي تتعلمها الكلاب أن تعرف أين يمكنها المشي وأين لا يمكنها ذلك. لذلك، يستخدم الفريق قاعدة البيانات لتدريب الذكاء الاصطناعي للتعرف على أنواع الأسطح التي يمكن السير عليها وتمييزها في صور جديدة.وهذا عمل مثير للاهتمام يبين كيف يمكن لأنظمة الذكاء الاصطناعي مطابقة أنواع معينة من الأداء الحيواني. يقول الفريق: "يتعلم نموذجنا من الفيديو المتمركز حول الذات ومعلومات الحركة للعمل والتخطيط مثل الكلب في نفس الوضع".
بالطبع، هناك الكثير من العمل في المستقبل. فعلى سبيل المثال، يجمع هذا العمل البيانات من كلب واحد. لذا يرغب الفريق في دراسة البيانات التي يتم جمعها من مجموعة واسعة من الكلاب. وهذا من شأنه أن يسمح لهم بمقارنة سلوكها وفهم الذكاء البصري للكلاب بمزيد من التفصيل.
ولكن لا يوجد سبب لضرورة أن يقتصر هذا النهج على الكلاب. سيكون هناك الكثير لتعلمه عن طريق جمع مجموعات بيانات مماثلة للقرود، وحيوانات المزرعة، وجميع أنواع الحيوانات في البرية. وكما صاغت إحساني وزملاؤها الفكرة بالقول: "نأمل أن يمهد هذا العمل الطريق نحو فهم أفضل للذكاء البصري عند الكائنات الذكية الأخرى التي تسكن عالمنا".