
في مبنى مقابل للمكتب الرئيسي لمعهد آلن للذكاء الاصطناعي في سياتل، يمتلك المعهد ما يكفي من أثاث إيكيا لتأثيث 14 شقة مختلفة. غير أن المعهد لم يشتر كل هذا للدخول في مجال التصميم الداخلي، بل لتدريب خوارزميات أكثر ذكاء للتحكم في الروبوتات.
تستطيع الروبوتات المنزلية، مثل رومبا، أن تعمل بشكل جيد فقط لأن مهامها بسيطة نسبياً. وإذا كان الهدف تنظيف نفس الأرضية بإصرار، فإن التجول هنا وهناك، والعودة إلى نفس المكان مرة تلو الأخرى مراراً وتكراراً، ليس بالأمر المهم فعلياً.
ولكن أي شيء يتطلب التحرك بشكل أكثر فعالية أو تعقيداً ما زال أمراً صعباً للغاية بالنسبة للكثير من أحدث الروبوتات. كما أن الأبحاث التي تهدف إلى تحسين هذا الوضع مكلفة للغاية، ما يجعل التطور في هذا المجال يكاد يقتصر على المختبرات التجارية.
والآن، يرغب معهد آلن باصطياد عصفورين بحجر واحد. فقد أعلن مؤخراً عن تحدٍّ جديد باسم روبوثور RoboTHOR (حيث ثور اختصار لعبارة منزل التفاعلات... حقاً). وسيلعب هذا التحدي أيضاً دور طريقة لإجراء التعهيد الجماعي للحصول على خوارزميات حركية أفضل، وإزالة بعض العوائق المالية من طريق الباحثين الذين لا يمتلكون موارد روبوتية خاصة بهم.
أما الهدف النهائي فهو تسريع تطور الذكاء الاصطناعي عن طريق إشراك المزيد من المجموعات البحثية. وستجلب هذه المجموعات المختلفة وجهات نظر مختلفة وحالات استخدم جديدة ستوسع من قدرات الروبوت، وتساعد هذا المجال على الاقتراب من تحقيق الذكاء القابل للتعميم.


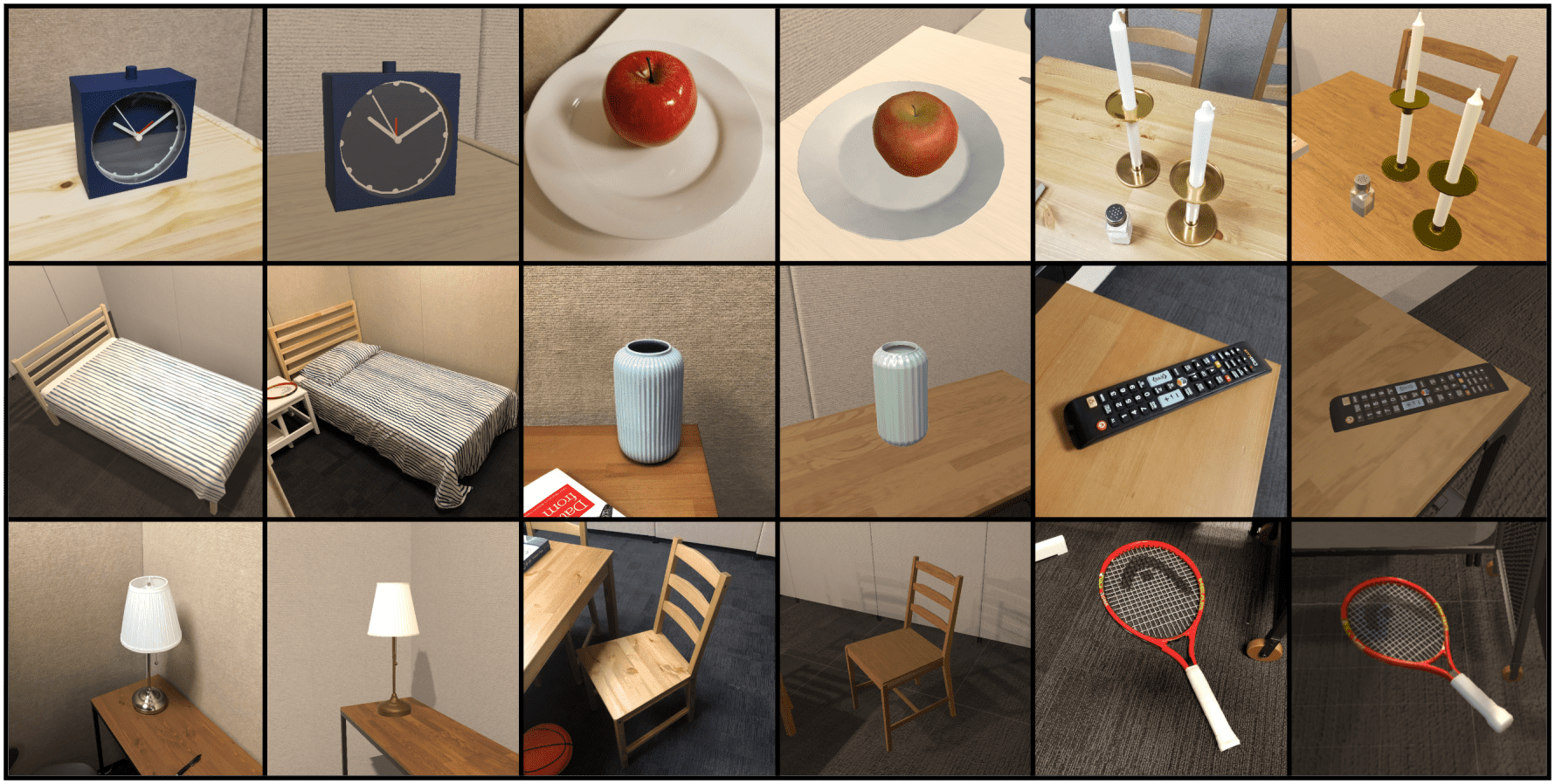
قام المختبر بتصميم غرفة يمكن تعديلها بسهولة، وهي بحجم استوديو سكني صغير، وذلك حتى تكون مسرحاً لجميع التشكيلات الأربعة عشر. كما قام أيضاً بتصميم نسخ افتراضية مطابقة في يونيتي Unity، وهو أحد محركات الألعاب ذائعة الصيت –إضافة إلى 75 تشكيل آخر- جُعلت جميعها مفتوحة المصدر على الإنترنت. وستلعب هذه التشكيلات التسعة والثمانون دور بيئة واقعية للمحاكاة يمكن أن تستخدمها الفرق في كافة أنحاء العالم لتدريب واختبار خوارزمياتها الحركية. كما أن هذه البيئات محملة مسبقاً أيضاً بنماذج من روبوتات معهد آلن، وتحاكي القوانين الفيزيائية للعالم الحقيقي مثل الجاذبية والضوء بشكل واقعي للغاية.
يقوم التحدي على تطوير خوارزميات قادرة على إيصال روبوت من موضع ابتدائي ضمن الغرفة إلى غرض في الغرفة، وذلك فقط بإعطائه اسم الغرض. وسيكون هذا أكثر صعوبة من مجرد عملية تحرك بسيطة لأنه سيتطلب من الروبوت استيعاب الأمر والتعرف على الغرض ضمن البيئة الافتراضية أيضاً.
ستتنافس الفرق على ثلاث مراحل. في المرحلة الأولى، ستحصل الفرق فقط على 75 بيئة محاكاة رقمية لتدريب الخوارزميات والتأكد من عملها. وفي المرحلة الثانية، ستُعطى الفرق التي حققت أداء مرتفعاً أربع بيئات محاكاة جديدة مع نسخها الواقعية الموافقة. وستتمكن الفرق من تحسين خوارزمياتها عن بعد بتحميلها إلى روبوتات معهد آلن الحقيقية.
في المرحلة النهائية، يجب على المتفوقين إبراز قدرة خوارزمياتهم على معالجة المعلومات والتعامل مع البيئات بشكل عام، وذلك في التشكيلات العشر المتبقية الافتراضية ومقابلاتها الحقيقية. وستنال الفرق الفائزة في هذه المرحلة النهائية حق التباهي والتبجح على الآخرين، إضافة إلى دعوة لاستعراض نماذجها في مؤتمر الرؤية الحاسوبية والتعرف على الأنماط، وهو أحد أهم مؤتمرات الذكاء الاصطناعي حول أنظمة الرؤية الحاسوبية.
بعد انتهاء التحدي، يخطط معهد آلن للحفاظ على هذا النظام، وإتاحة استخدام هذه البيئة لأي شخص للاستمرار في إجراء البحوث على الروبوتات. وسيُسمح للباحثين الذين يتجاوزون حداً معيناً من الدقة في البيئات الافتراضية –ما يُثبت أنهم لن يتسببوا بتحطيم الروبوتات الحقيقية- بتطبيق خوارزمياتهم عن بعد ضمن البيئات الحقيقية. وسيتم تغيير الغرفة بالتناوب بين عدة تشكيلات للأثاث.
يقول آني كيمبافي، وهو عالم باحث في معهد آلن ومدير المشروع: "سنحافظ على هذه البيئة وهذه الروبوتات". ويخطط فريقه لتطوير نظام تشاركي على أساس الوقت للسماح للباحثين المختلفين بالتناوب على اختبار خوارزمياتهم عن بعد في العالم الحقيقي.
يأمل معهد آلن بأن هذه الاستراتيجية ستسهل من إجراء الأبحاث على الروبوتات، وذلك بالتخلص من أغلبية التكاليف المتعلقة بالعتاد الصلب. كما يأمل بأن هذه الخطة ستوحي لغيره من المنظمات جيدة التمويل بفتح مواردها للآخرين بطرق مماثلة. إضافة إلى ذلك، فقد تعمد باحثو معهد آلن تصميم الغرف المتغيرة باستخدام مواد منخفضة التكاليف وقطع أثاث متوفرة في كافة أنحاء العالم من إيكيا، وتبلغ التكاليف التقريبية حوالي 10,000 دولار. وإذا أراد باحثون آخرون بناء بيئاتهم الحقيقية الخاصة بها، يمكنهم بسهولة استنساخ هذه البيئة محلياً بحيث يحافظون على التطابق مع بيئات المحاكاة الافتراضية.
يشبه كيمبافي –الذي يعمل والده كفلكي- هذه الفكرة بالتشارك العالمي للتلسكوبات، ويقول: "لقد تمكنت بعض الأوساط العلمية، مثل أوساط علم الفلك، من التوصل إلى طرق لمشاركة الموارد المكلفة مع الباحثين في جميع أنحاء العالم. هذه رؤيتنا لهذه البيئة: الذكاء الاصطناعي الواقعي للجميع".