
النشأة والدراسة
ولد أسامة الخطيب في مدينة حلب السورية سنة 1950، وانتقل منها إلى فرنسا من أجل دراسة الهندسة الكهربائية في جامعة مونبلييه ليحصل منها على درجة الإجازة سنة 1974، ثم تابع دراساته العليا ليحصل على درجة الماجستير سنة 1976، وأنهى تعليمه بحصوله على شهادة الدكتوراه من المدرسة الوطنية العليا لعلوم الطيران والفضاء في مجال هندسة التحكم الآلي.
انتقل الخطيب بعد إنهائه درجة الدكتوراه ليعمل في قسم علوم الحاسب في جامعة ستانفورد الأميركية، حيث عمل باحثاً مشاركاً من 1981 وحتى 1989، ومن ثم ترقى لمنصب أستاذ مساعد سنة 1990 وبقي كذلك حتى ترقيته لمنصب أستاذ (بروفيسور) سنة 2000، ولا يزال يشغل نفس المنصب حتى يومنا هذا، بالإضافة إلى عمله رئيساً لمخبر الأنظمة الروبوتية في جامعة ستانفورد، وعضويته في مبادرة بيو-إكس الخاصة بجامعة ستانفورد.
العمل البحثي والأكاديمي
يمتلك الخطيب سجلاً كبيراً من الابتكارات والأبحاث الأصيلة في مجال التحكم في حركة الروبوتات، والروبوتات ذات التصميم المشابه للإنسان، والتفاعل اللمسي، والاصطناع الحركي المشابه لحركة البشر. وقد ركزت أعماله بشكلٍ كبير على تطوير نظريات وخوارزميات في مجال التحكم في الأنظمة الروبوتية عبر استخدام نماذج ديناميكية، بهدف التوصل لأفضل آليات قيادة ممكنة للروبوتات المعقدة التي تتفاعل مع البيئة المحيطة بها في الزمن الحقيقي.
شارك بروفيسور الخطيب بتأليف سلسلةٍ من الكتب الصادرة عن دار نشر سبرينجر Springer المرموقة في مجال الأنظمة الروبوتية، كما عمل في اللجان التحريرية للعديد من الدوريات العلمية، ولعل أبرز أعماله في التأليف هي مشاركته في تأليف كتاب الدليل الشامل للأنظمة الروبوتية Handbook of Robotics الصادر أيضاً عن دار نشر سبرينجر، والذي يُعتبر اليوم أحد أهم وأبرز المراجع عالمياً في مجال تصميم الأنظمة الروبوتية والتحكم فيها، كما حصل الكتاب على جائزة بروز PROSE الأميركية المرموقة في مجال التأليف.
يشغل بروفيسور الخطيب منصب رئيس المنظمة العالمية للأبحاث الروبوتية IFRR، وحصل على جائزة الجمعية اليابانية للروبوتات في مجال البحث والتطوير، كما حصل سنة 2010 على جائزة راس RAS من معهد الهندسة الكهربائية والإلكترونية الأميركي IEEE لأعماله الريادية في أبحاث التحكم الآلي وعلوم الروبوت، كما حصل سنة 2013 على جائزة من نفس المنظمة تقديراً لدوره الريادي البارز في المجتمع العلمي المعني بأبحاث التحكم الآلي وعلوم الروبوت، وأخيراً حصل سنة 2014 على جائزة راس من معهد IEEE في المجال القيادي.
وبحسب الصفحة الرّسمية للبروفيسور أسامة الخطيب على موقع جامعة ستانفورد فإن المجالات التي يركز عليها في عمله مع فريقه البحثي تشمل ما يلي:
- التحكم في الروبوتات المستوحاة من البشر Humanoid Robot Control
- الروبوتات الصديقة للبشر Human Friendly Robotics
- الرنين المغناطيسي النووي الوظيفي اللمسي Haptic fMRI
- المستكشف الروبوتي للبحر الأحمر Red Sea Robotic Exploratorium
- تعلم التفاعل والحركة Learning Motion and Interaction
- التحكم والمحاكاة Control and Simulation
- الأنظمة اللمسية والتحكم عن بعد Haptics and Teleoperation
- الميكانيك الحيوي البشري Human Biomechanics
وبالإضافة إلى عمله وقيمته الكبيرة بصفته باحثاً مرموقاً وأحد رواد العلوم الروبوتية حول العالم، يقوم البروفيسور أسامة الخطيب بتدريس عددٍ من المقررات التعليمية في جامعة ستانفورد، وهي: مقرر "مدخل إلى الأنظمة الروبوتية Introduction to Robotics"، ومقرر "الروبوتات التطبيقية Experimental Robotics"، بالإضافة إلى مقرر "الروبوتات المتقدمة Advanced Robotics". قامت مؤسسة شمسنا العربية بترجمة مقرر "مدخل إلى الأنظمة الروبوتية" تحت عنوان "مقدمة في علم الروبوت" بكامل الملفات والنشاطات المرتبطة به، ويمكن مشاهدة المحاضرات مجاناً على قناة المؤسسة على موقع يوتيوب.
القيمة العلمية والإنجازات البحثية في مجال الأنظمة الروبوتية
يعود أول الإنجازات الرائدة لأسامة الخطيب أثناء دراسته لمرحلة الدكتوراه عندما قام بتطوير طريقة جديدة تهدف لتجنب المشاكل المرافقة لتخطيط مسار حركة الروبوت، حيث تم تسمية طريقته الجديدة باسم "المجال الاصطناعي المحتمل Artificial Potential Field"، التي تم تقديمها لأول مرة سنة 1978. الدافع الأساسي لتطوير هذه الطريقة هو الحاجة الملحة لتطوير أنظمة روبوتية تفاعلية قادرة على العمل في بيئاتٍ ذات هيكلية أو بنية غير واضحة، ونظراً لأهمية الطريقة فقد تم تبنيها على صعيدٍ واسع في العديد من الأبحاث المتعلقة بعلوم الروبوتات.
ويعود ثاني الإنجازات البحثية الهامة للبروفيسور أسامة الخطيب لسنة 1980، عندما قام بتقديم صيغة جديدة تم تسميتها صيغة الفضاء العملياتي Operational Space Formulation، التي تساهم في تجنب التحكم في الروبوت وصلة تلو الأخرى، وبدلاً من ذلك، فإن النموذج الجديد يؤدي لصياغة ديناميكية حركة الروبوت وتحليل أدائه والتحكم فيه ضمن الفضاء المكاني الذي تم تحديد المهمة فيه.
وكان أحد التحديات الكبيرة في مجال الأنظمة الروبوتية خلال فترة التسعينيات يتمثل في الجمع بين مهام التنقل والحركة؛ إذ عادةً ما كانت تركز الأبحاث على تطوير أحد هذه الجوانب، إلا أن البروفيسور الخطيب قام مع فريقه بابتكار زوجٍ روبوتيّ شهير جمع بين هاتين المهمتين؛ وهما الروبوتان روميو وجولييت. من حيث الشكل، فإن روميو وجولييت عبارة عن ذراعين روبوتيين مثبتين على قاعدة دائرية تستطيع الحركة عبر دواليب أسفلها، وفي حين أن شكلها العام يشبه إلى حدٍ كبير الروبوتات المستخدمة في المجال الصناعيّ، إلا أن لروميو وجولييت قدرات متقدمة بالنسبة للروبوتات، مثل غسل الصحون المنزلية والتقاط الكتب من الرفوف ومسح الألواح وإزالة الغبار عن النوافذ.
علاوةً على ذلك، تم تصميم روميو وجولييت ليعملا كزوجين متناغمين، حيث يستطيعا التعاون مع بعضهما البعض لإنجاز العديد من المهام مثل نقل الأغراض الكبيرة. شكل الكشف عن روميو وجولييت قفزةً كبيرة في مجال تطوير الأنظمة الروبوتية خلال فترة التسعينيات من القرن الماضي، وهي أمور جلبت شهرة إضافية للبروفيسور الخطيب ودوره كعالمٍ بارز في مجال الأبحاث الروبوتية، خصوصاً في مجال التفاعل بين البشر والأنظمة الروبوتية وتصميم الروبوتات المستوحى من البشر.
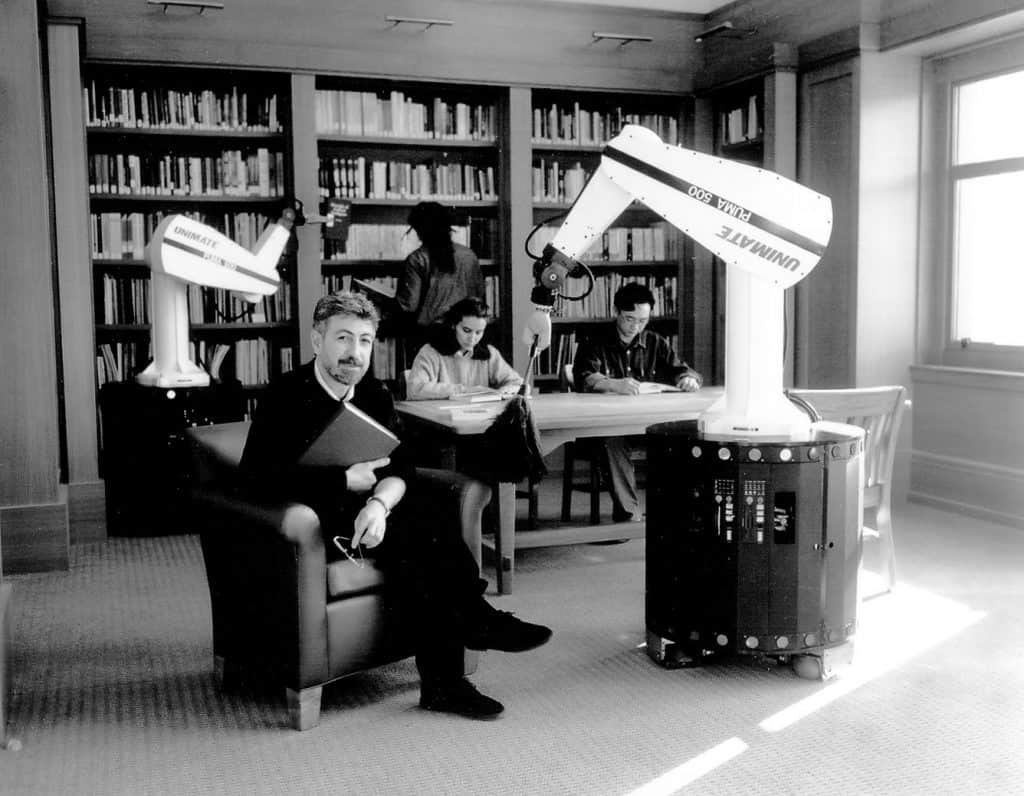
مصدر الصورة: جامعة ستانفورد
يمتلك البروفيسور أسامة الخطيب قيمةً علمية كبيرة نظراً لعمله في مجال التفاعل اللمسي Haptic Interaction في الأنظمة الروبوتية. لنتخيل وجود روبوتٍ يمتلك أيدي وأصابع لتلك التي يمتلكها البشر؛ سيكون من الصعب على روبوت مثل هذا التقاطُ الأشياء من حوله بنفس درجة الحساسية التي نستطيعها نحن، فنحن نستطيع تمييز الأشياء المرنة التي يجب ألا نضغط عليها كثيراً أثناء التقاطها، كما أننا نميز الأشياء الصغيرة التي يتطلب التقاطُها استخدامَ إصبعين فقط وبدرجة ضغط معينة. هذه القدرات المتقدمة من اللمس عالي التحسس والدقة هو ما يركز عليه مجال التفاعل اللمسي في الأنظمة الروبوتية، الذي يمكن أيضاً أن يتم عن بعد، بمعنى أن يكون هنالك عنصرٌ بشري يقوم بتحريك أصابعه بطريقةٍ معينة لالتقاط أمرٍ ما، وسيقوم الروبوت بتقليد الحركة التي يقوم بها العنصر البشري وبنفس الحساسية المطلوبة. يُعتبر أسامة الخطيب أحد روّاد مجال التفاعل اللمسي في الروبوتات، وخصوصاً مجال التفاعل اللمسي عن بعد.
وأحد الإنجازات الرائدة التي ساهم فيها البروفيسور أسامة الخطيب كنتيجةٍ لأبحاثه في مجال التفاعل اللمسي هي تطوير تقنية الرنين المغناطيسي الوظيفي التفاعلي اللمسي Haptic fMRI؛ حيث تستخدم أجهزة الرنين المغناطيسي الوظيفي fMRI في عمليات التصوير الطبي المتعلق بالنشاط العصبي، حيث يمكن عبره فهم نشاط الدماغ المصاحب لأداء مهمةٍ ما، ولكن المشكلة الأساسية هي المحدوديات المترافقة بأجهزة الرنين المغناطيسي من حيث مساحتها الداخلية الضيقة وعدم وجود حرية حركة كبيرة للمريض أثناء عملية التصوير. هذا الأمر هو ما قاد أسامة الخطيب للمشاركة في بحثٍ رائد سنة 2013 بهذا المجال بالتعاون مع مختصين في مجال أبحاث الأعصاب من جامعة ستانفورد لتطوير نظام الواجهة اللمسية للرنين المغناطيسي الوظيفي، والمعروفة اختصاراً باسم HFI، التي تدخل المريض ضمن تجربة واقع افتراضي أثناء وجوده داخل جهاز التصوير، وتتيح له التحكم بحركاتٍ يقوم روبوت بتنفيذها عن طريق أوامر لمسية، بحيث تكون الحركات التي يجريها الروبوت مشابهةً للحركات التي يفكر فيها المريض ويريد تنفيذها، وبذلك سيكون جهاز الرنين المغناطيسي قادراً على تسجيل نشاط الدماغ وكأن المريض نفسه هو من يقوم بتنفيذ الحركات، وليس الروبوت.

مصدر الصورة: Osada/Seguin/DRASSM
ويعتبر المستكشف الروبوتي أوشن ون OceanOne من أهم الابتكارات التقنية التي أشرف البروفيسور الخطيب على إنجازها، وهو عبارة عن نظام روبوتي شبيه بالإنسان Humanoid يمكن التحكم فيه عن بعد عن طريق أنظمة لمسية متقدمة، وهو الأمر الذي يتيح قيادته والتحكم فيه بدقةٍ عالية عن بعد، مما يسمح بتطوير عمليات اكتشاف أعماق البحار والمحيطات بدقةٍ عالية جداً، وهو ما سمح له باكتشاف حطام وبقايا سفينة "القمر La Lune" على عمق 100 متر من سطح البحر المتوسط، وهي السفينة النفيسة الخاصة بالملك الفرنسي لويس الرابع عشر، التي غرقت على بعد 20 ميلاً جنوبي شواطئ فرنسا سنة 1664، ولم تفلح كل المحاولات البشرية في استكشاف حطامها أو استرجاع الكنوز والنفائس التي حملتها السفينة، وقد تمكن المستكشف أوشن ون مؤخراً من استرجاع إناء بحجم حبة الرّمان وإعادته للسطح بحالةٍ ممتازة، ليتمكن علماء الآثار والمهندسين المختصين من دراسته وفحصه. شكل هذا النجاح نقطةً بارزة للمستكشف أوشن ون الذي يعد بإمكانيات كبيرة في المستقبل في مجال استكشاف الأعماق والوصول لأماكن سيكون من الصعب على الغواصات الصغيرة التي يقودها البشر الوصول إليها.