
تعتبر قاعدة البيانات إميج نت -التي لا تتمتع بشهرة تُذكر- من الأبطال المجهولين في ثورة الذكاء الاصطناعي؛ فقد قام ببنائها مجموعة من الباحثين في جامعة برينستون، وتحتوي على نحو 14 مليون صورة، وقد تم الاعتماد على التعهيد الجماهيري لتزويد كل من هذه الصور بإشارة توضيحية نصية تشرح محتواها.
تنبع أهمية إميج نت من كونها قاعدة البيانات التي تعتمد عليها الكثير من الشبكات العصبونية القوية في تدريبها. تتعلم الشبكات العصبونية عن طريق تفحص الصورة والنص المرافق، وكلما كانت قاعدة البيانات أكبر، كانت عملية التعلم أفضل. ومن دون إميج نت وغيرها من قواعد البيانات المرئية، فلن تتمكن حتى أقوى الشبكات العصبونية من التعرف على أي شيء.
والآن، يقول أخصائيو الروبوتات إنهم سيجربون طريقة مماثلة باستخدام الفيديو لتعليم الروبوتات كيف تتفاعل مع البيئات. ويعمل سوديب داساري من جامعة كاليفورنيا بيركلي مع مجموعة من زملائه على بناء قاعدة بيانات تحمل اسم روبونِت، تتألف من فيديوهات مصنفة لروبوتات أثناء عملها. وعلى سبيل المثال، فقد تتضمن البيانات عدة لقطات لروبوت يحرك كأساً على الطاولة، ويمكن لأي شخص أن يقوم بتنزيل هذه البيانات واستخدامها لتدريب الشبكة العصبونية للروبوت حتى يتمكن من تحريك الكأس أيضاً، حتى لو لم يتفاعل مع أي كأس من قبل.
ويأمل داساري وزملاؤه بأن تتحول قاعدة البيانات هذه إلى مصدر يمكن استخدامه لإجراء التدريب المسبق لمعظم الروبوتات على أداء معظم المهام، بشكل أقرب ما يكون إلى جامعة روبوتات يطلق عليها الفريق اسم روبونت.
وحتى الآن، لم يحقق أخصائيو الروبوتات سوى نجاح محدود في تعليم روبوتاتهم كيفية المناورة ضمن البيئات والتفاعل معها، ويعتمدون على أسلوب التعلم الآلي المعياري التي ساعدت إميج نت على توسيع انتشاره.
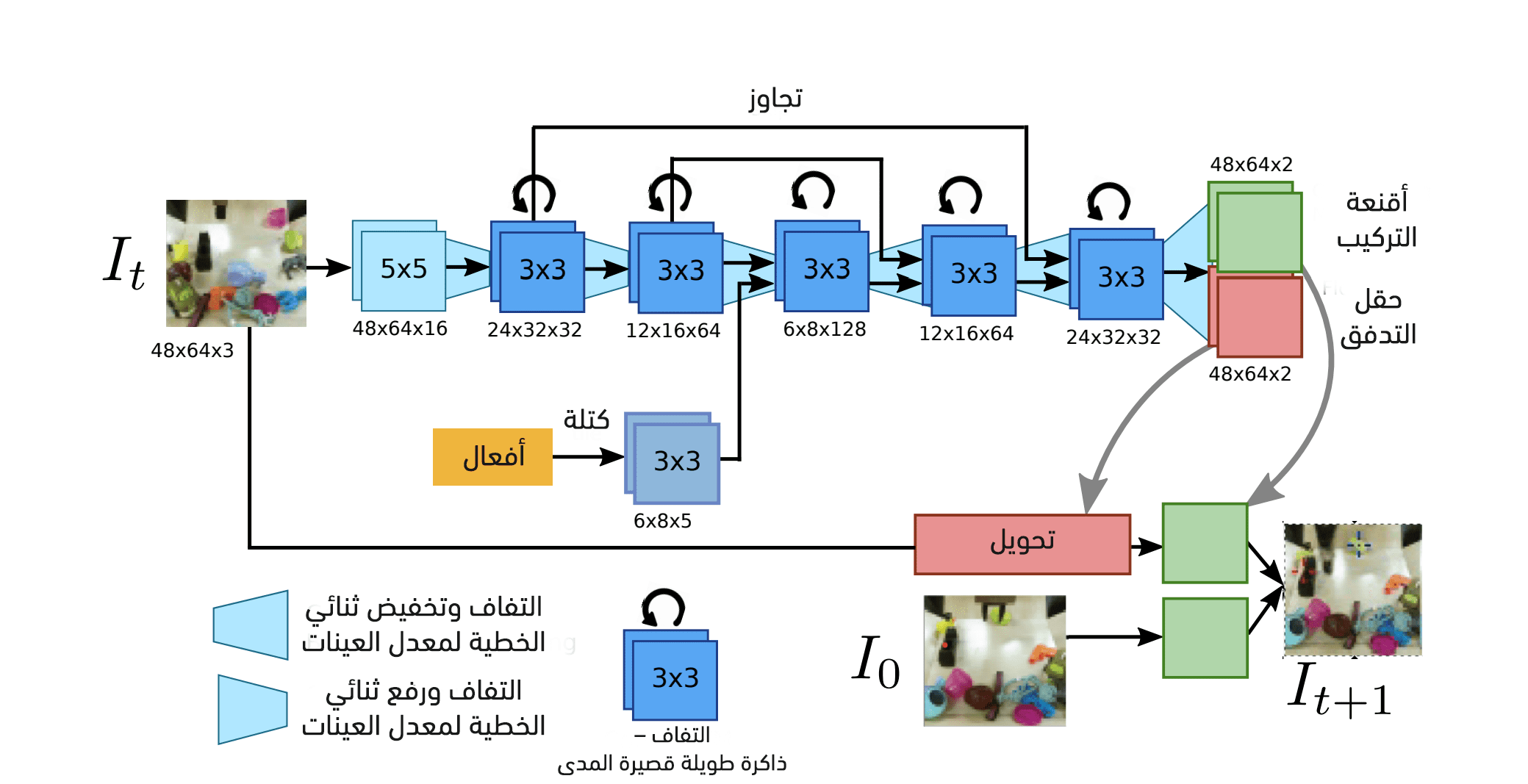
مصدر الفيديو: روبونِت
بدأ الباحثون يسجلون طريقة تفاعل الروبوت مع فرشاة -على سبيل المثال- لتحريكها على سطح ما، ومن ثم تسجيل الكثير من الفيديوهات الأخرى لهذه الحركة، واستخدام البيانات لتدريب شبكة عصبونية على كيفية أدائها بأفضل شكل ممكن.
وتكمن الحيلة بطبيعة الحال في الحصول على مقدار كبير من البيانات، أي تجميع ساعات وساعات من مقاطع الفيديو التي يمكن التعلم منها. وما أن يتقن الروبوت كيفية تحريك الفرشاة، يجب أن يخوض نفس عملية التعلم من جديد لتحريك أي شيء آخر تقريباً، سواء أكانت ملعقة أو نظارة. وإذا تغيرت البيئة المحيطة، عادة ما يجب إعادة عملية التعلم بالكامل.
يقول داساري وزملاؤه: “تقوم الطريقة المعتادة على إعادة تجميع البيانات منذ البداية بالنسبة لكل بيئة جديدة، مما يعني إعادة تعلم المعرفة الأساسية حول العالم، وهذا جهد ضائع”. غير أن روبونت تلتف حول هذه المشكلة، كما يضيف الباحثون: “ولهذا قدمنا روبونت، وهي قاعدة بيانات مفتوحة لمشاركة الخبرة الروبوتية”، أي أن أي روبوت يستطيع التعلم من خبرة روبوت آخر.
ولإطلاق قاعدة البيانات، قام الفريق بتسجيل حوالي 15 مليون لقطة فيديو لمهام تتضمن استخدام أنواع مختلفة من الروبوتات المزودة بمقابض مختلفة ضمن بيئات متنوعة. ويبيّن داساري وزملاؤه كيفية استخدام هذه القاعدة في عملية التدريب المسبق للروبوتات على المهام التي لم تجربها من قبل، ويقولون إن أداء الروبوتات المدربة بهذه الطريقة أفضل من تلك التي خضعت للتدريب التقليدي، حتى بكمية أكبر من البيانات.
ويمكن لأي شخص استخدام بيانات روبونت، وبالطبع يأمل داساري وزملاؤه بأن الفرق البحثية الأخرى ستبدأ بتقديم مساهماتها لتحويل روبونت إلى مصدر كبير للتعلم الروبوتي.
إنه عمل هام قد يؤدي إلى نتائج كبيرة؛ حيث يقول الباحثون: “يمثل هذا العمل الخطوة الأولى نحو بناء برامج روبوتية تستطيع العمل في نطاق واسع من البيئات المختلفة وباستخدام العديد من أنواع العتاد الصلب”.
ولا يخلو هذا العمل من التحديات الكبيرة بطبيعة الحال. وعلى سبيل المثال، يجب على الباحثين أن يفكروا في أفضل طريقة لاستخدام البيانات، وما زالوا يبحثون في أفضل أساليب التدريب، ويقولون: “نأمل بأن روبونت ستكون إلهاماً لنطاق واسع من أوساط أخصائيي الروبوتات والتعلم المعزز لدراسة كيفية تضخيم خوارزميات التعلم المعزز حتى تصبح على مستوى تعقيد العالم الحقيقي”.
إن النتيجة مثيرة للإعجاب والتفكير في نفس الوقت، فهي تشبه جامعة روبوتات يمكن أن تقدم لأي روبوت المهارات التي يحتاج إلى تعلمها.
لقد كانت إميج نت عاملاً أساسياً في جعل الرؤية الآلية قادرة على مضاهاة البشر في التعرف على الأجسام، وإذا كانت روبونت بنصف نجاحها، فهو مكسب كبير.
المرجع: arxiv.org/abs/1910.11215:
روبونت: التعلم الروبوتي المتعدد واسع النطاق